Description
Myself and 3 teammates competed in the 2020 WARMAN competition, unfortunately an online only simulation event due to the lockdowns in Melbourne at the time. However we still were able to create a simulation which placed our design within the top submissions of the year. I have linked an interactive model here.
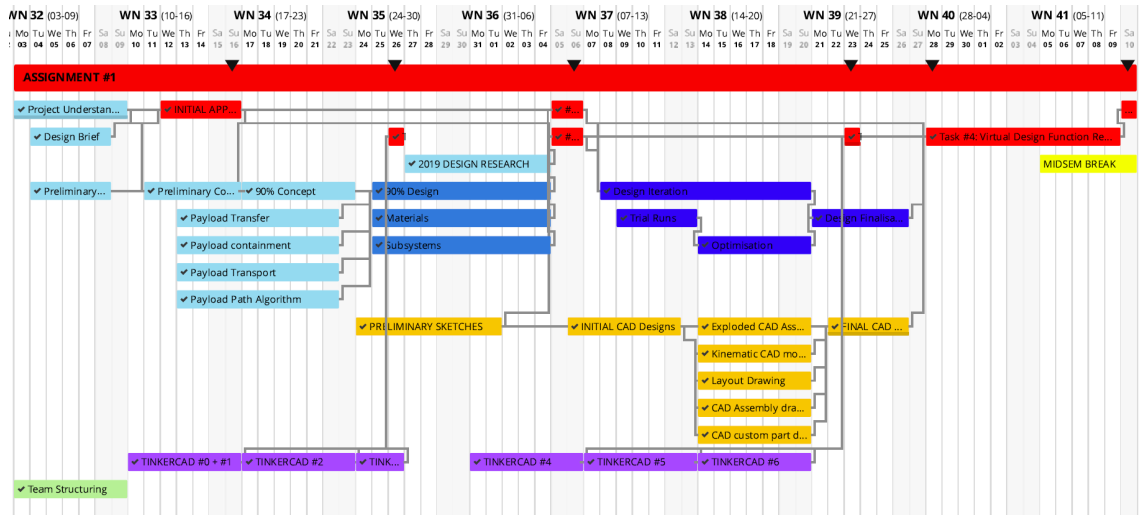
I took on the role of team lead and consequently did a lot of organisation of the team, involving requirements analysis and project management:
Outline
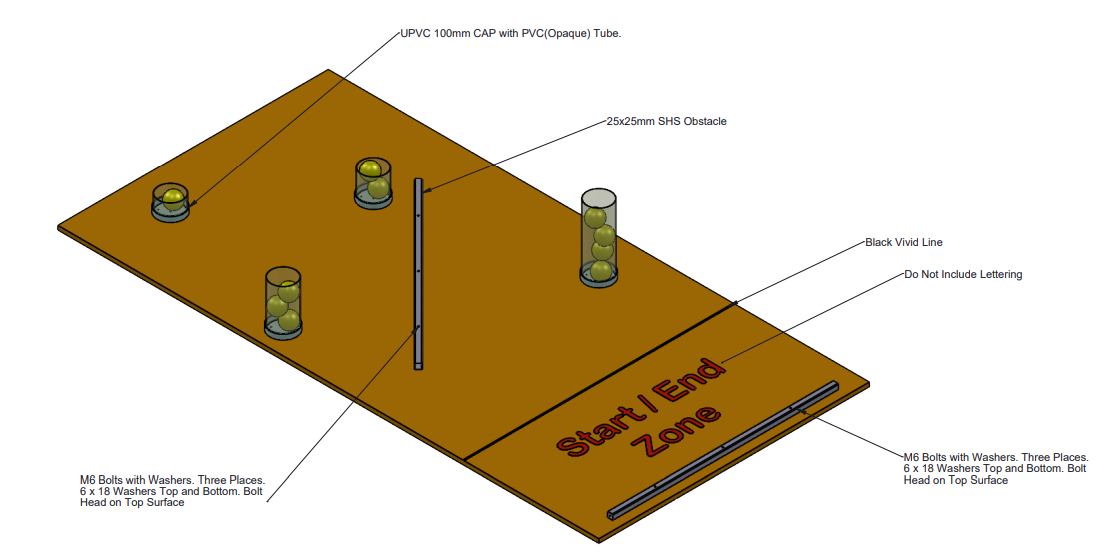 The 2020 competition involved delivering an already loaded payload to 4 vertical tubes while also navigating an obstacle. The payload was 10 tennis balls and a different number of balls were to be delivered to each vessel. The system was required to start in the start zone and return to the same zone once it had completed its delivery
The 2020 competition involved delivering an already loaded payload to 4 vertical tubes while also navigating an obstacle. The payload was 10 tennis balls and a different number of balls were to be delivered to each vessel. The system was required to start in the start zone and return to the same zone once it had completed its delivery
Design
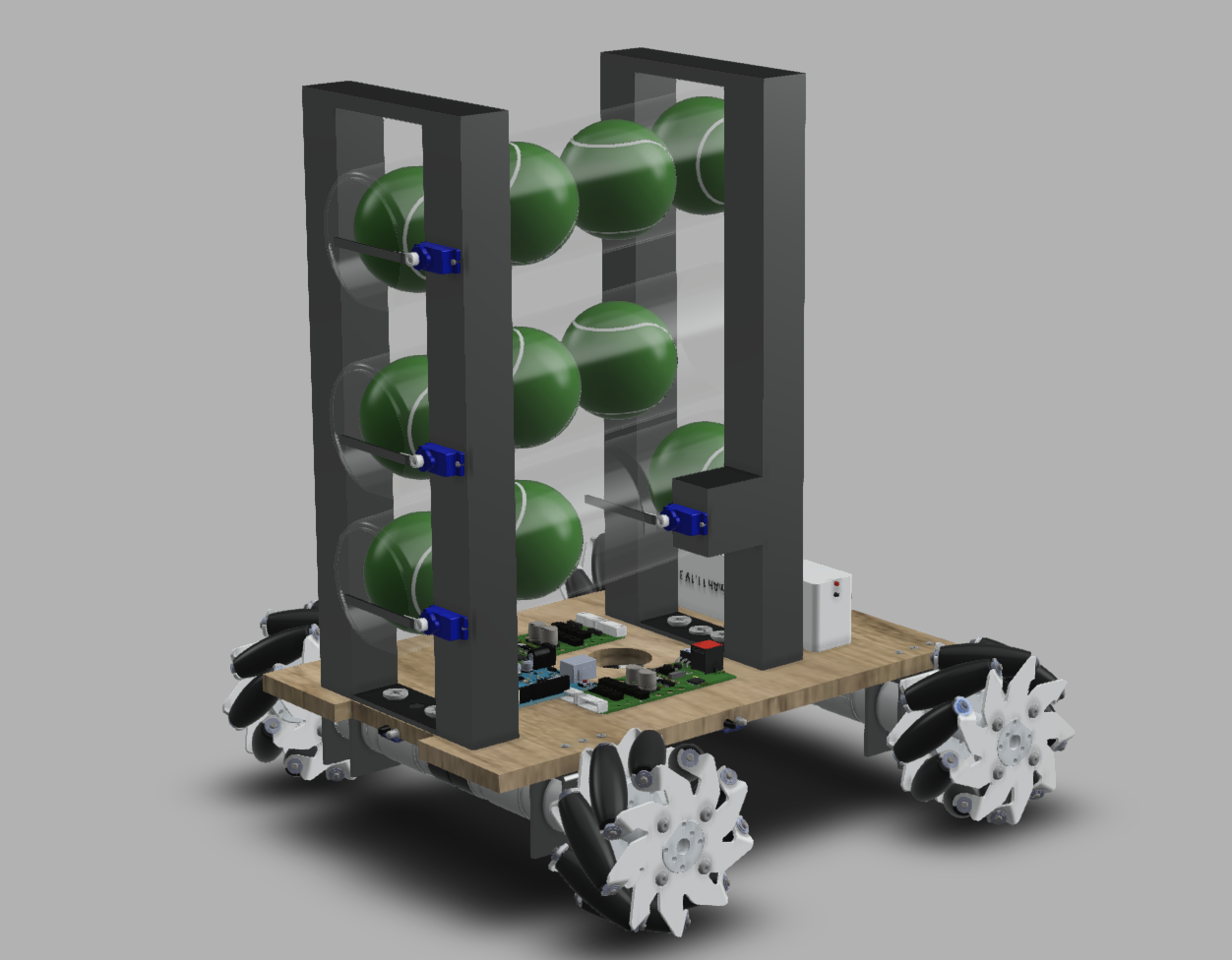
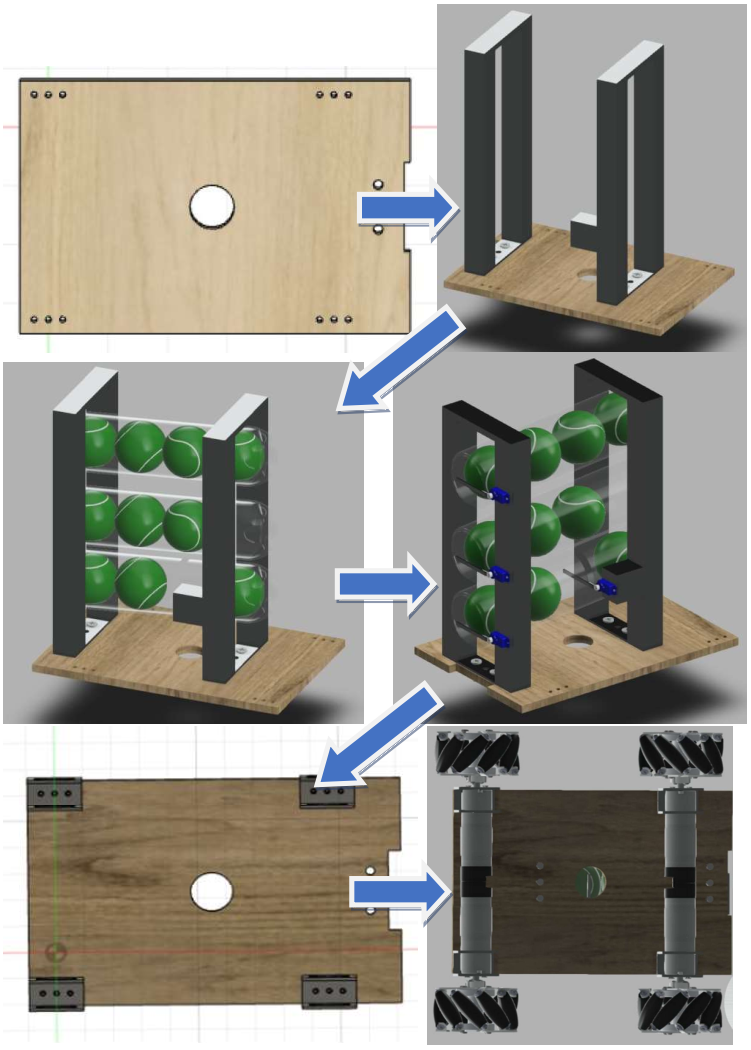
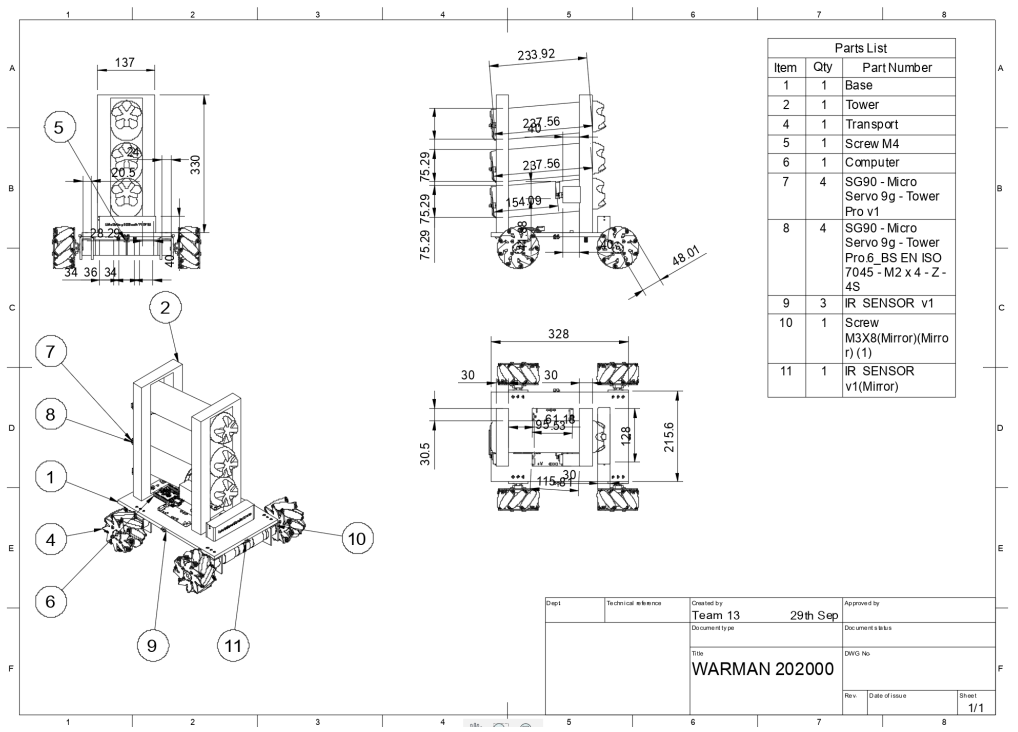
Our proposed solution was a mobile system that deposits the payload using gravitational energy and servo motors. We also found a motor encoder system that allowed a Mecanum wheel to be driven by a DC motor, increasing the simplicity of the mobility design as it could tie into the deposit circuit system.
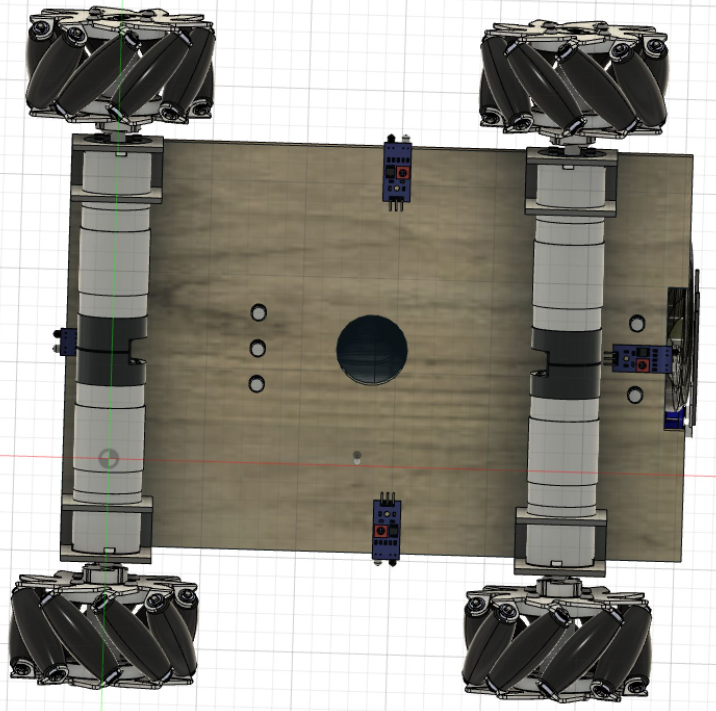
The frame was designed to be constructed of two 3D printed towers, each holding 3 tennis ball containers which in turn are able to hold a maximum of 4 tennis balls each. The bottom container had a vertical slit cut into it in order to allow for controlled deposition of the final ball.
For the system to detect and avoid obstacles we decided to use a dynamic algorithm that would combine both sensor based and fixed path algorithms. To be able to implement the sensor based algorithm, we attached multiple infrared sensors to the underside of the MDF base.
Manufacture
Although our team were not able to construct our robot due to the covid restrictions at the time, we produced an in depth manufacturing plan to demonstrate the simplicity and constructibility of our design.
Comments